
Konfiguracja parametrów
Dla każdego profilu możesz skonfigurować listę podłączonych czujników.







Instrukcja

 - Wyświetlić listę pojazdów.
- Wyświetlić listę pojazdów.- 3.
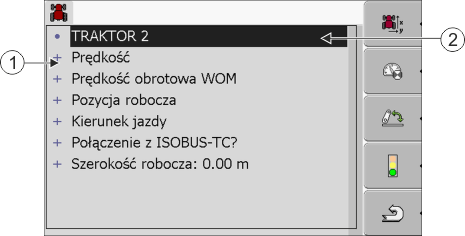
- Wybrać profil.
- 4.
- Skonfigurować parametry. Możesz też zmienić nazwę profilu.
Parametry profilu pojazdu
Na ekranie wyświetlane są tylko te parametery, które możesz konfigurować na twoim terminalu.
Podczas konfiguracji czujników należy nie tylko wybrać rodzaj zamontowanego czujnika, ale również sposób jego podłączenia do terminalu.
Istnieją przy tym dwie możliwości:
- ▪
- Czujnik jest podłączony do portu szeregowego (port B) terminalu. (np.: czujnik pozycji roboczej, inne czujniki podłączone za pomocą 7-pinowego gniada sygnałowego). Parametry tak podłączonych czujników nie mają nigdy w nazwie słów "poprzez CAN".
- ▪
- Czujnik jest podłączony do ISOBUSa, a jego sygnał osiąga terminal poprzez port CAN (port A). Parametry tak podłączonych czujników mają zawsze w nazwie słowa "poprzez CAN".
Prędkość
Konfiguracja czujnika prędkości. Służy on do pomiaru prędkości.
Możliwe wartości:
- ▪
- "dezaktywowany"
- Nie ma czujnika prędkości.
- ▪
- "Czujnik kołowy"
- Czujnik kołowy jest podłączony do terminalu. Czujnik kołowy musi zostać skalibrowany.
- ▪
- "Czujnik radarowy"
- Czujnik radarowy jest podłączony do terminalu. Czujnik radarowy musi zostać skalibrowany.
- ▪
- "Odbiornik GPS"
- Prędkość mierzona jest przy użyciu sygnału GPS.
- ▪
- "Nieznany czujnik poprzez CAN"
- Czujnik kołowy lub czujnik radarowy jest połączony z terminalem poprzez CAN.
- ▪
- "Czujnik radarowy poprzez CAN"
- Czujnik radarowy jest połączony z terminalem poprzez CAN.
- ▪
- "Czujnik kołowy poprzez CAN"
- Czujnik kołowy jest połączony z terminalem poprzez CAN.
Prędkość obrotowa WOM
Konfiguracja obrotomierza wału odbioru mocy. Służy on do pomiaru liczby obrotów WOM na minutę.
Możliwe wartości:
- ▪
- "dezaktywowany"
- Brak czujnika.
- ▪
- "Obrotomierz z przodu"
- Obrotomierz jest zamontowany na przednim wale odbioru mocy.
- ▪
- "Obrotomierz z tyłu"
- Obrotomierz jest zamontowany na tylnym wale odbioru mocy.
- ▪
- "Impulsy/obr."
- Ilość sygnałów wysyłanych przez czujnik co obrót wału.
Pozycja robocza
Za pomocą tego parametru możesz ustawić, czy czujnik pozycji roboczej jest dostępny oraz jak jego sygnał dochodzi do terminalu.
Możliwe wartości:
- ▪
- "dezaktywowany"
- Żaden czujnik nie wykrywa pozycji roboczej.
- ▪
- "Z przodu przez wtyk B"
- Czujnik pozycji roboczej znajduje się na przednim podnośniku lub na urządzeniu zamontowanym na przednim podnośniku. Jest on podłączony do terminalu poprzez wtyk B. Czujnik pozycji roboczej musi zostać skonfigurowany.
- ▪
- "Z tyłu przez wtyk B"
- Czujnik pozycji roboczej znajduje się na tylnym podnośniku lub na urządzeniu zamontowanym na tylnym podnośniku. Jest on podłączony do terminalu poprzez wtyk B. Czujnik pozycji roboczej musi zostać skonfigurowany.
- ▪
- "Nieznany czujnik poprzez CAN"
- Dostępny jest czujnik pozycji roboczej, który ustala pozycję roboczą urządzenia. Jest on podłączony do komputera roboczego ISOBUS lub do innego terminalu. Sygnał dochodzi do terminalu poprzez CAN.
- ▪
- "Z przodu poprzez CAN"
- Dostępny jest czujnik pozycji roboczej, który ustala pozycję roboczą urządzenia na przodzie pojazdu. Jest on podłączony do komputera roboczego ISOBUS lub do innego terminalu. Sygnał dochodzi do terminalu poprzez CAN.
- ▪
- "Z tyłu poprzez CAN"
- Dostępny jest czujnik pozycji roboczej, który ustala pozycję roboczą urządzenia z tyłu pojazdu. Jest on podłączony do komputera roboczego ISOBUS lub do innego terminalu. Sygnał dochodzi do terminalu poprzez CAN.
Kierunek jazdy
Dzięki temu parametrowi możesz skonfigurować, czy terminal odbiera sygnał kierunku jazdy i z jakiego źródła. Jeżeli sygnał kierunku jazdy jest dostępny, aplikacja TRACK-Leader może poprawnie zaznaczać kierunek jazdy podczas jazdy wstecz.
Możliwe wartości:
- ▪
- "nieaktywny"
- Czujnik kierunku jazdy nie jest podłączony do terminalu. Jeżeli inne urządzenie podłączone do ISOBUSa przesyła sygnał kierunku jazdy, terminal go nie blokuje.
- ▪
- "Nieznany czujnik poprzez CAN"
- Terminal odbiera sygnał kierunku jazdy przez port CAN, ale nie zna jego źródła.
- ▪
- "Czujnik radarowy poprzez CAN"
- Do portu CAN terminalu podłączony jest czujnik radarowy, wyposażony w rozpoznanie kierunku jazdy.
- ▪
- "Czujnik kołowy poprzez CAN"
- Do portu CAN terminalu podłączony jest czujnik kołowy z możliwością rozpoznania kierunku jazdy.
- ▪
- "Czujnik kierunku jazdy"
- Czujnik kierunku jazdy podłączony jest do portu szeregowego terminalu. Nie działa, gdy podłączony jest czujnik pozycji roboczej.
- ▪
- "Inwersja"
- Przy pomocy tego parametru możesz odwrócić znaczenie sygnału. Działa tylko z połączeniu z parameterem "Czujnik kierunku jazdy".
Połączenie z ISOBUS-TC?
Za pomocą tego parametru ustawisz, czy chcesz połączyć aplikację Tractor-ECU z aplikacją ISOBUS-TC. Aplikacja ta przesyła jednocześnie: liczniki, pozycję roboczą, pozycję odbiornika GPS.
Dezaktywuj ten parametr tylko wówczas, jeśli terminal jest używany jako terminal dodatkowy, a odbiornik GPS jest podłączony do innego terminalu.
Szerokość robocza
W celu obliczenia obrobionej powierzchni wartość jest przesyłana do aplikacji ISOBUS-TC.
Parametr ten umożliwia przede wszystkim udokumentowanie obrobionej powierzchni przy maszynach innych niż ISOBUS, jeżeli pracujesz w TRACK-Leader bez komputera roboczego ISOBUS, a jednocześnie używasz aplikacji ISOBUS-TC ze zleceniami ISO-XML.
W takiej konstelacji terminal standardowo nie przesyła żadnych danych maszyny do ISOBUS-TC. W celu późniejszej możliwości obliczenia obrabianej powierzchni w karcie pola możesz tutaj wprowadzić szerokość roboczą.
Funkcja ta działa jednak tylko w przypadku podłączenia i korzystania z czujnika pozycji roboczej.
Pamiętaj o tym, aby po zakończeniu pracy z maszyną inną niż ISOBUS wybrać inny profil pojazdu w Tractor-ECU, aby nie przekazywać za każdym razem szerokości roboczej.
Weiterführende Informationen