
Sõidukiprofiili parameetrite konfigureerimine
Sõidukiprofiilis saate määrata kasutatavad andurid.







Toimingud

 – Avage sõidukite loend.
– Avage sõidukite loend.- 3.
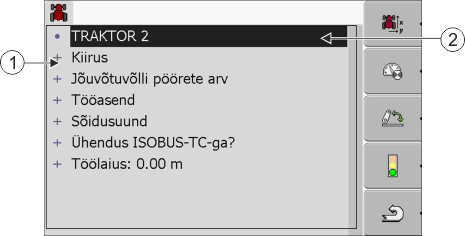
- Valige sõidukiprofiil.
- 4.
- Muutke soovitud parameetreid. Muuta saate ka sõidukiprofiili nime.
Sõidukiprofiili parameetrid
Kuvatakse ainult neid parameetreid, mida saate oma terminali riistvaraversioonis konfigureerida.
Sensorite konfigureerimisel tuleb lisaks paigaldatud sensori tüübile valida, kuidas on sensor terminaliga ühendatud.
Selleks on kaks võimalust.
- ▪
- Sensor on terminaliga ühendatud jadaliidese kaudu (ühendus B). (Nt tööasendi andur, kõik muud sensorid, mis ühendatakse 7-klemmise signaaliliidese kaudu). Sel viisil ühendatud sensoritel pole täiendit „CAN-i kaudu”.
- ▪
- Sensor on ühendatud ISOBUS-iga ja selle signaal jõuab terminali CAN-liidese kaudu (ühendus A). Nende sensorite parameetril on alati täiend „CAN-i kaudu”.
Kiirus
Kiirusanduri konfiguratsioon. Mõõdab kiirust.
Võimalikud väärtused:
- ▪
- desaktiveeritud
- Kiirust ei mõõda ükski andur.
- ▪
- Rattaandur
- Terminaliga on ühendatud rattaandur. Rattaandur tuleb kalibreerida.
- ▪
- Radariandur
- Terminaliga on ühendatud radariandur. Radariandur tuleb kalibreerida.
- ▪
- GPS-vastuvõtja
- GPS arvutab kiiruse.
- ▪
- Tundmatu andur CAN-i kaudu
- Terminaliga on CAN-i kaudu ühendatud ratta- või radariandur.
- ▪
- Radariandur CAN-i kaudu
- Terminaliga on CAN-i kaudu ühendatud radariandur.
- ▪
- Rattaandur CAN-i kaudu
- Terminaliga on CAN-i kaudu ühendatud rattaandur.
Jõuvõtuvõlli pöörete arv
Jõuvõtuvõlli pöörete arvu anduri konfiguratsioon. Mõõdab jõuvõtuvõlli pöörete arvu.
Võimalikud väärtused:
- ▪
- desaktiveeritud
- Jõuvõtuvõlli pöörete arvu ei mõõda ükski andur.
- ▪
- Pöörete arvu andur ees
- Eesmisel jõuvõtuvõllil olev pöörete arvu andur.
- ▪
- Pöörete arvu andur taga
- Tagumisel jõuvõtuvõllil olev pöörete arvu andur.
- ▪
- Impulsid/pööre
- Jõuvõtuvõlli pöörde kohta edastatav impulsside arv.
Tööasend
Selle parameetriga on võimalik määrata, kas kasutatakse tööasendi andurit ja kuidas selle signaal jõuab terminali.
Võimalikud väärtused:
- ▪
- „deaktiveeritud“
- Tööasendit ei mõõda ükski andur.
- ▪
- „Esiosa pistiku B kaudu“
- Tööasendi andur asub esihaakeseadisel või esihaakeseadisele paigaldatud tööseadmel. Andur on ühendatud terminaliga pistiku B kaudu. Tööasendi andur tuleb kalibreerida.
- ▪
- „Tagaosa pistiku B kaudu“
- Tööasendi andur asub tagahaakeseadisel või tagahaakeseadisele paigaldatud tööseadmel. Andur on ühendatud terminaliga pistiku B kaudu. Tööasendi andur tuleb kalibreerida.
- ▪
- Tundmatu andur CAN-i kaudu
- Olemas on tööasendi andur, mis teeb kindlaks töömasina tööasendi. See on ühendatud ISOBUS-juhtseadise või mõne muu terminaliga. Signaal jõuab terminali CAN-i kaudu.
- ▪
- Ees CAN-i kaudu
- Olemas on tööasendi andur, mis teeb töömasina tööasendi kindlaks sõiduki esiosas. See on ühendatud ISOBUS-juhtseadise või mõne muu terminaliga. Signaal jõuab terminali CAN-i kaudu.
- ▪
- Taga CAN-i kaudu
- Olemas on tööasendi andur, mis teeb töömasina tööasendi kindlaks sõiduki tagaosas. See on ühendatud ISOBUS-juhtseadise või mõne muu terminaliga. Signaal jõuab terminali CAN-i kaudu.
Sõidusuund
Selle parameetriga määrate, kas terminal saab vastu võtta sõidusuunasignaali ja millisest allikast see tuleb. Kui sõidusuunasignaal on saadaval, saab rakendus TRACK-Leader tagurpidi sõitmisel õigesti märkida läbitud vahemaa.
Võimalikud väärtused:
- ▪
- desaktiveeritud
- Terminaliga pole sõidusuunaandurit ühendatud. Kui mõni muu ISOBUS-seade saadab sõidusuunasignaali, siis seda ei blokeerita.
- ▪
- Tundmatu andur CAN-i kaudu
- Terminal võtab CAN-i kaudu vastu tundmatust allikast pärit sõidusuunasignaali.
- ▪
- Radariandur CAN-i kaudu
- Terminaliga on CAN-i kaudu ühendatud sõidusuunda tuvastav radariandur.
- ▪
- Rattaandur CAN-i kaudu
- Terminaliga on CAN-i kaudu ühendatud sõidusuunda tuvastav rattaandur.
- ▪
- Sõidusuunaandur
- Terminali jadaliidesega on ühendatud sõidusuunaandur. Ei tööta, kui terminaliga on ühendatud tööasendiandur.
- ▪
- Ümberpööramine
- Selle parameetri korral on signaali tähendus ümber pööratud. Kehtib ainult parameetri Sõidusuunaandur korral.
Ühendus ISOBUS-TC-ga?
Selle parameetriga määrate, kas rakendus Tractor-ECU suhtleb rakendusega ISOBUS-TC. Seejuures kannab rakendus üle: Loendurid, tööasend, GPS-vastuvõtja asukoht.
Desaktiveerige see parameeter ainult siis, kui terminali kasutatakse teise terminalina ja GPS-vastuvõtja on ühendatud mõne teise terminaliga.
Töölaius
Väärtus edastatakse töödeldud ala arvutamiseks rakendusele ISOBUS-TC.
Eelkõige aitab parameeter muude kui ISOBUS-seadmete korral jäädvustada töödeldud ala, kui kasutate rakendust TRACK-Leader ISOBUS-juhtseadiseta ja kasutate samal ajal rakendust ISOBUS-TC ISO-XML-tellimustega.
Sellistel juhtudel ei edastata rakendusele ISOBUS-TC tavaliselt masina andmeid. Siin saate sisestada töölaiuse, et hiljem põllumaade registris saaks arvutada töödeldud alad.
Seda funktsiooni saab kasutada ainult juhul, kui teil on ka tööasendi andur.
Ärge unustage pärast muu kui ISOBUS-masinaga töötamist rakenduses Tractor-ECU muud sõidukiprofiili valida, et töölaiust ei kantaks üle.
Weiterführende Informationen