Приложение Tractor-ECU Настройка параметров профиля транспортного средстваНастройка датчика рабочего положения
Настройка параметров профиля транспортного средстваНастройка датчика рабочего положения
Настройка параметров профиля транспортного средстваНастройка датчика рабочего положенияНастройка датчика рабочего положения
Если датчик рабочего положения подключен к терминалу через штекер В, Вы должны сообщить терминалу, по какому принципу работает датчик.
При настройке Вы можете выбирать между тремя типами датчиков:
- ▪
- "аналоговый"
- Вы применяете аналоговый датчик рабочего положения, который измеряет высоту трехточечного подъемника в процентах.
- ▪
- "цифровой"
- Вы используете цифровой, совместимый с ISO датчик рабочего положения по ISO 11786. Датчик подключен к терминалу через сигнальную розетку.
- ▪
- "ME-cенсор Y"
- Вы применяете датчик рабочего положения от Müller-Elektronik. Датчик подключен к терминалу.
Порядок действий
- þ
- Вы подключили датчик рабочего положения непосредственно к терминалу или через сигнальную розетку к терминалу.
- þ
- Вы выбрали в параметре "Рабочее положение" значение "Сенсор передней навески" или "Сенсор задней навески".

 - вызвать список транспортных средств.
- вызвать список транспортных средств.- 3.
- Выбрать профиль транспортного средства.
 - Нажмите.
- Нажмите.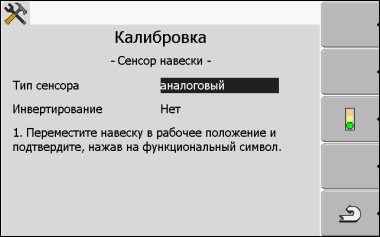
- 5.
- Выберите тип датчика.
- 6.
- Выберите, хотите ли Вы инвертировать сигнал. Инвертирование имеет смысл только в том случае, если Вы выбрали "цифровой" или "ME-cенсор Y".
- 7.
- Если Вы выбрали "цифровой" или "ME-cенсор Y":
 - вернитесь к профилю транспортного средства.
- вернитесь к профилю транспортного средства.
ИЛИ
Если Вы выбрали "аналоговый": Сенсор навески переместить на высоту, на которой начинается рабочее положение.
 - нажмите для подтверждения.
- нажмите для подтверждения.- ⇨
- Вы настроили датчик рабочего положения.