
Настройка параметров профиля транспортного средства
В профиле транспортного средства Вы можете настроить, какие датчики Вы применяете.







Порядок действий

 - вызвать список транспортных средств.
- вызвать список транспортных средств.- 3.
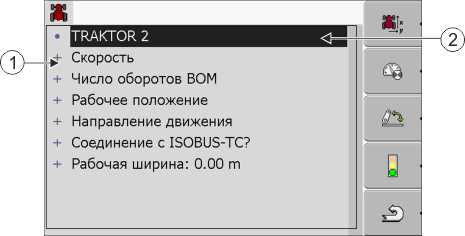
- Выбрать профиль транспортного средства.
- 4.
- Измените необходимые параметры. Вы можете также изменить название профиля транспортного средства.
Параметры профиля транспортного средства
Показываются только те параметры, которые Вы можете настроить с помощью версии аппаратного обеспечения Вашего терминала.
При настройке конфигурации датчиков вы должны указать не только установленный датчик, но и способ его подключения к терминалу.
При этом у вас есть две возможности:
- ▪
- Датчик подключен к терминалу с помощью последовательного интерфейса (Разъем B). (Например: Датчик рабочего положения, все датчики, которые могут быть подключены с помощью 7-контактной сигнальной розетки). Параметры для подобным образом подключенных датчиков не содержат в названии дополнительной записи "через CAN".
- ▪
- Датчик подключен к ISOBUS, а его сигнал поступает в терминал через интерфейс шины CAN (Разъем A). Параметры для подобных датчиков всегда содержат в названии дополнительную запись "через CAN".
Скорость
Настройка датчика скорости. Он измеряет скорость.
Возможные значения:
- ▪
- "деактивирован"
- Никакой датчик не измеряет скорость.
- ▪
- "Датчик частоты вращения колеса"
- Датчик частоты вращения колеса подключен к терминалу. Датчик частоты вращения колеса необходимо калибровать.
- ▪
- "Датчик радара"
- Датчик радара подключен к терминалу. Датчик радара необходимо калибровать.
- ▪
- "GPS-приёмник"
- Скорость рассчитывается с помощью GPS.
- ▪
- "неизв. сенсор через CAN"
- Датчик частоты вращения колеса или датчик радара связан с терминалом через CAN.
- ▪
- "Датчик радара через CAN"
- Датчик радара связан с терминалом через CAN.
- ▪
- "Датч.част.вращ.кол.над CAN"
- Датчик частоты вращения колеса связан с терминалом через CAN.
Скорость вращения вала отбора мощности
Настройка датчика скорости вращения вала отбора мощности. Он измеряет скорость вращения вала отбора мощности.
Возможные значения:
- ▪
- "деактивирован"
- Ни один датчик не измеряет скорость вращения вала отбора мощности.
- ▪
- "Датч. част. вр. пер. нав."
- Датчик скорости вращения, находящийся на переднем валу отбора мощности.
- ▪
- "Датч. час. вр. задн. нав."
- Датчик скорости вращения, находящийся на заднем валу отбора мощности.
- ▪
- "Имп./об." (Импульсы на оборот)
- Количество импульсов, которые вал отбора мощности передает за оборот.
Рабочее положение
С помощью этого параметра Вы можете настроить, имеется ли датчик рабочего положения, и как его сигнал достигает терминала.
Возможные значения:
- ▪
- "деактивирован"
- Ни один датчик не измеряет рабочее положение.
- ▪
- "Спереди через штекер В"
- Датчик рабочего положения находится на переднем подъемном механизме или на рабочем агрегате, смонтированном на переднем подъемном механизме. Он подключен к терминалу через штекер В. Датчик рабочего положения должен быть настроен.
- ▪
- "сзади через штекер В"
- Датчик рабочего положения находится на заднем подъемном механизме или на рабочем агрегате, смонтированном на заднем подъемном механизме. Он подключен к терминалу через штекер В. Датчик рабочего положения должен быть настроен.
- ▪
- "неизв. сенсор через CAN"
- Имеется датчик рабочего положения, который определяет рабочую позицию рабочего агрегата. Он подключен к вычислителю ISOBUS или к другому терминалу. Сигнал достигает терминала через CAN.
- ▪
- "Передняя часть через CAN"
- Имеется датчик рабочего положения, который определяет рабочую позицию рабочего агрегата спереди транспортного средства. Он подключен к вычислителю ISOBUS или к другому терминалу. Сигнал достигает терминала через CAN.
- ▪
- "Задняя часть через CAN"
- Имеется датчик рабочего положения, который определяет рабочую позицию рабочего агрегата сзади транспортного средства. Он подключен к вычислителю ISOBUS или к другому терминалу. Сигнал достигает терминала через CAN.
Направление движения
С помощью данного параметра вы можете указать в конфигурации, может ли терминал получать сигнал о направлении движения, и каков источник подобного сигнала. При наличии сигнала о направлении движения приложение TRACK-Leader может надлежащим образом разметить проход для движения задним ходом.
Возможные значения:
- ▪
- "деактивирован"
- К терминалу не был подключен ни один сенсор направления движения. Тем не менее, сигнал о направлении движения не блокируется, даже если он направляется другим прибором ISOBUS.
- ▪
- "неизв. сенсор через CAN"
- Терминал получает по шине CAN сигнал о направлении движения, источник которого неизвестен.
- ▪
- "Датчик радара через CAN"
- Датчик радара с функцией определения направления движения связан с терминалом по шине CAN.
- ▪
- "Датч.част.вращ.кол.над CAN"
- Датчик частоты вращения колеса с функцией определения направления движения связан с терминалом по шине CAN.
- ▪
- "Сенсор направления движения"
- Сигнал о направлении движения связан с последовательным интерфейсом терминала. Не работает, если к терминалу подключен датчик рабочего положения.
- ▪
- "Инвертирование"
- С помощью этого параметра инвертируется значение сигнала. Действует только в сочетании с параметром "Сенсор направления движения".
Соединение с ISOBUS-TC?
С помощью этого параметра Вы настраиваете, должно ли приложение Tractor-ECU взаимодействовать с приложением ISOBUS-TC. При этом оно передает: счетчик, рабочее положение, положение GPS-приёмника.
Деактивируйте этот параметр только в том случае, если терминал используется в качестве второго терминала и GPS-приёмник подключен к другому терминалу.
Рабочая ширина
Значение передается приложению ISOBUS-TC для расчета обработанной площади.
Данный параметр позволяет, прежде всего, документировать значения обработанной площади для машин, несовместимых с ISO, если вы работаете в приложении TRACK-Leader без вычислителя ISOBUS и если вы одновременно используете приложение ISOBUS-TC с заданиями ISO-XML.
В данном случае параметры машины, как правило, не передаются приложению ISOBUS-TC. Вы можете внести сюда значение рабочей ширины, чтобы сохранить возможность впоследствии рассчитать значение обработанной площади в карточке обработки поля.
Данную функцию можно использовать только в том случае, если у вас есть датчик рабочего положения.
Подумайте о том, чтобы после завершения работы с машиной, несовместимой с ISOBUS, выбрать в приложении Tractor-ECU другой профиль транспортного средства, чтобы устранить необходимость постоянного переноса значения рабочей ширины.
Weiterführende Informationen