
Bir araç profilinin parametrelerinin yapılandırılması
Bir araç profilinde, hangi parametreleri kullandığınızı ayarlayabilirsiniz.







Prosedür

 - Araç listesini ekrana getirin.
- Araç listesini ekrana getirin.- 3.
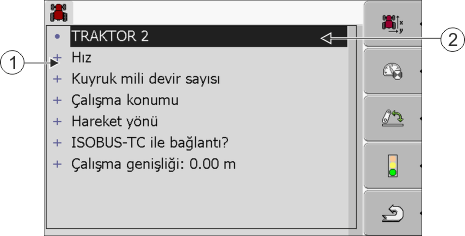
- Araç profilini seçin.
- 4.
- İstenen parametreyi değiştirin: Araç profilinin ismini de değiştirebilirsiniz.
Bir araç profilinin parametreleri
Sadece terminalinizin donanım versiyonu ile yapılandırabileceğiniz parametreler görüntülenir.
Sensörleri konfigüre ederken sadece hangi sensörün monte edildiği dışında ayrıca sensörün terminale nasıl bağlı olduğunu da seçmelisiniz.
Bunun içi iki seçenek var:
- ▪
- Bir sensör seri arayüz (B bağlantısı) üzerinden terminale bağlanmıştır. (örn.: İş pozisyonu sensörü, 7 kutuplu sinyal prizine takılabilen tüm sensörler). Bu şekilde bağlanmış sensörlerin parametreleri "CAN üzerinden" eklentisine sahip değildir.
- ▪
- Bir sensör ISOBUS'a bağlandı ve bir sinyal terminale CAN arayüzü üzerinden (A bağlantısı) ulaştı. Bu sensörlerin parametreleri her zaman "CAN üzerinden" eklentisine sahiptir.
Hız
Hız sensörünün konfigürasyonu. Hızı ölçmektedir.
Olası değerler:
- ▪
- "aktif değil"
- Hızı ölçen bir sensör yok.
- ▪
- "Tekerlek sensörü"
- Bir tekerlek sensörü terminale bağlıdır. Tekerlek sensörünün kalibre edilmesi gerekir.
- ▪
- "Radar sensörü"
- Bir radar sensörü terminale bağlıdır. Radar sensörünün kalibre edilmesi gerekir.
- ▪
- "GPS alıcısı"
- Hız, GPS ile hesaplanmaktadır.
- ▪
- "CAN üzrndn bilnmyen sensör"
- Bir tekerlek sensörü veya bir radar sensörü, CAN üzerinden terminale bağlıdır.
- ▪
- "CAN üzerinden radar sensörü"
- Bir radar sensörü CAN üzerinden terminale bağlıdır.
- ▪
- "CAN üzerinden tekerlek sensörü"
- Bir tekerlek sensörü CAN üzerinden terminale bağlıdır.
Kuyruk mili devir sayısı
Kuyruk milinin devir sayısı sensörünün konfigürasyonu Kuyruk milinin devir sayısını ölçmektedir.
Olası değerler:
- ▪
- "aktif değil"
- Kuyruk milinin devir sayısını ölçen bir sensör yok.
- ▪
- "Ön taraf devir sayısı sensörü"
- Ön kuyruk milinde bulunan bir devir sayısı sensörü.
- ▪
- "Arka devir sy.sensörü"
- Arka kuyruk milinde bulunan bir devir sayısı sensörü.
- ▪
- "İmp/devir."
- Devir başına kuyruk milinin ilettiği impulsların sayısı.
Çalışma konumu
Bu parametreyi kullanarak, bir çalışma pozisyonu sensörünün mevcut olup olmadığını ve sinyalinin terminale nasıl ulaşacağını ayarlayabilirsiniz.
Olası değerler:
- ▪
- "aktif değil"
- Bir sensör, çalışma konumunu ölçmüyor.
- ▪
- "B konnektörü üzerinden ön taraf"
- Ön kaldırma düzeninde veya ön kaldırma düzenine monteli çalışma aparatında bir çalışma pozisyonu sensörü mevcuttur. Konektör B üzerinden terminale bağlıdır. Çalışma pozisyonu sensörünün konfigüre edilmesi zorunludur.
- ▪
- "B konnektörü üzerinden arka taraf"
- Arka kaldırma düzeninde veya arka kaldırma düzenine monteli çalışma aparatında bir çalışma pozisyonu sensörü mevcuttur. Konektör B üzerinden terminale bağlıdır. Çalışma pozisyonu sensörünün konfigüre edilmesi zorunludur.
- ▪
- "CAN üzerinden bilinmeyen sensör"
- Çalışma aparatının çalışma konumunu tespit eden bir çalışma pozisyonu sensörü var. Bir ISOBUS iş bilgisayarına veya başka bir terminale bağlıdır. Sinyal, terminale CAN üzerinden ulaşmaktadır.
- ▪
- "CAN üzerinden ön taraf"
- Araç ön kısmında çalışma aparatının çalışma konumunu tespit eden bir çalışma pozisyonu sensörü var. Bir ISOBUS iş bilgisayarına veya başka bir terminale bağlıdır. Sinyal, terminale CAN üzerinden ulaşmaktadır.
- ▪
- "CAN üzerinden arka taraf"
- Araç arka kısmında çalışma aparatının çalışma konumunu tespit eden bir çalışma pozisyonu sensörü var. Bir ISOBUS iş bilgisayarına veya başka bir terminale bağlıdır. Sinyal, terminale CAN üzerinden ulaşmaktadır.
Hareket yönü
Bu parametreyle terminalin bir hareket yönü sinyali alıp alamayacağını ve bu sinyalin hangi kaynaktan geleceğini konfigüre edebilirsiniz. Eğer bir hareket yönü sinyali varsa TRACK-Leader uygulaması geri doğru hareket edildiğinde doğru işaretleme yapabilir.
Olası değerler:
- ▪
- "aktif değil"
- Terminale bir hareket yönü sensörü takılmadı. Ancak başka bir ISOBUS cihazı bir hareket yönü sinyali gönderirse, bu sinyal bloke edilmez.
- ▪
- "CAN üzerinden bilinmeyen sensör"
- Terminal CAN üzerinden bir hareket yönü sinyali alıyor, ancak bunun kaynağı bilinmiyor.
- ▪
- "CAN üzerinden radar sensörü"
- Hareket yönü algılama özelliğine sahip bir radar sensörü, CAN üzerinden terminale bağlandı.
- ▪
- "CAN üzerinden tekerlek sensörü"
- Hareket yönü algılama özelliğine sahip bir tekerlek sensörü, CAN üzerinden terminale bağlandı.
- ▪
- "Hareket yönü sensörü"
- Terminalin seri arayüzüne bir hareket yönü sinyali bağlandı. Eğer terminale bir iş pozisyonu sensörü bağlıysa bu fonksiyon çalışmaz.
- ▪
- "Tersleme"
- Bu parametreyle sinyalin anlamı tersine çevrilir. Sadece "Hareket yönü sensörü" parametresiyle bağlantılı olarak geçerlidir.
ISOBUS-TC ile bağlantı?
Bu parametre ile Tractor-ECU uygulamasının ISOBUS-TC uygulamasıyla iletişim kurup kurmayacağını ayarlayabilirsiniz. Bunu yaparken şunlar aktarılır: Sayaç, çalışma konumu, GPS alıcısının pozisyonu.
Bu parametreyi, yalnızca terminal ikinci terminal olarak kullanılıyorsa ve GPS alıcısı da başka bir terminale bağlıysa devre dışı bırakın.
Çalışma genişliği
İşlenen yüzeyi hesaplamak için bu değer ISOBUS-TC uygulamasına aktarılır.
TRACK-Leader uygulamasında ISOBUS iş hesap birimi olmadan çalışıyorsanız ve ISOBUS-TC uygulamasını ISO-XML görevleriyle birlikte kullanıyorsanız, bu parametreyle özellikle de ISOBUS'suz makinelerde işlenen yüzeyi kaydetmek mümkündür.
Bu durumda standartlara göre ISOBUS-TC'ye herhangi bir makine verisi aktarılmaz. Daha sonra tarla kart indeksinde, işlenen alanı hesaplayabilmek için çalışma genişliğini buraya girebilirsiniz.
Bu fonksiyonu kullanabilmeniz için bir iş pozisyonu sensörüne sahip olmanız gerekir.
ISOBUS'suz bir makineyle çalıştıktan sonra çalışma genişliğini her defasında tekrar aktarmak zorunda kalmamak için Tractor-ECU'dan başka bir araç profilini seçmeyi unutmayın.
Weiterführende Informationen