
Come configurare i parametri del profilo del veicolo
Nel profilo veicolo potranno essere impostati i sensori da utilizzare.







Procedura

 - Richiamare l'elenco dei veicoli.
- Richiamare l'elenco dei veicoli.- 3.
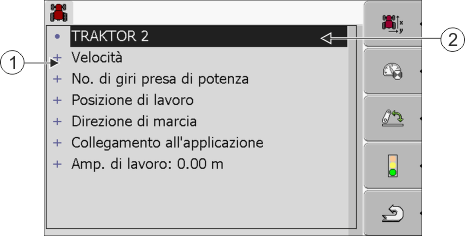
- Selezionare il profilo veicolo.
- 4.
- Modificare i parametri desiderati. È possibile modificare anche il nome del profilo del veicolo.
Parametri del profilo veicolo
Verranno visualizzati solo i parametri configurabili con la rispettiva versione hardware del Vostro terminale.
Durante la configurazione dei sensori è necessario selezionare oltre al sensore da montare anche la modalità di collegamento dello stesso al terminale.
Esistono due opzioni:
- ▪
- Il sensore va collegato al terminale mediante una porta seriale (connettore B). (ad es.: sensore posizione di lavoro, tutti i sensori collegabili attraverso la presa di segnale a 7 poli). I parametri per i sensori così collegati non dispongono della dicitura "tramite il CAN".
- ▪
- Il sensore è collegato al sistema ISOBUS ed il rispettivo segnale raggiunge il terminale mediante la porta CAN (connettore A). I parametri per tali sensori dispongono sempre della dicitura "tramite il CAN".
Velocità
Configurazione del sensore di velocità. Rileva la velocità.
Valori possibili:
- ▪
- “disattivato“
- Nessun sensore rileva la velocità.
- ▪
- “Sensore ruota“
- Al terminale è collegato un sensore ruota. È necessario calibrare il sensore ruota.
- ▪
- “Sensore radar“
- Al terminale è collegato un sensore radar. È necessario calibrare il sensore radar.
- ▪
- “Ricevitore GPS“
- La velocità viene calcolata con il GPS.
- ▪
- “Sens.non ricon.tram.il CAN“
- Un sensore ruota o un sensore radar è collegato al terminale mediante il CAN.
- ▪
- “Sensore radar tramite il CAN“
- Un sensore radar è collegato al terminale mediante il CAN.
- ▪
- “Sensore ruota tramite il CAN“
- Un sensore ruota è collegato al terminale mediante il CAN.
No. di giri presa di potenza
Configurazione del sensore del numero di giri della presa di potenza. Rileva il numero di giri della presa di potenza.
Valori possibili:
- ▪
- “disattivato“
- Nessun sensore rileva il numero di giri della presa di potenza.
- ▪
- “Sensore num. di giri front.“
- Un sensore del numero di giri situato sulla presa di potenza frontale.
- ▪
- “Sensore num. di giri post.“
- Un sensore del numero di giri situato sulla presa di potenza posteriore.
- ▪
- “Impulsi/giro“
- Numero di impulsi al giro trasmessi dalla presa di potenza.
Posizione di lavoro
Con questo parametro, è possibile impostare se è presente il sensore posizione di lavoro e come il segnale raggiunge il terminale.
Valori possibili:
- ▪
- "disattivato"
- Nessun sensore rileva la posizione di lavoro.
- ▪
- "Anteriore con il connettore B"
- Un sensore posizione di lavoro è posto sul sollevatore frontale o sulla macchina montata sul sollevatore frontale. È collegato al terminale mediante il connettore B. È necessario configurare il sensore di posizione di lavoro.
- ▪
- "Posteriore con il connettore B"
- Un sensore posizione di lavoro è posto sul sollevatore posteriore o sulla macchina montata sul sollevatore posteriore. È collegato al terminale mediante il connettore B. È necessario configurare il sensore di posizione di lavoro.
- ▪
- “Sens.non ricon.tram.il CAN“
- È presente un sensore posizione di lavoro per determinare la posizione di lavoro della macchina. Esso è collegato a un computer di bordo ISOBUS o a un diverso terminale. Il segnale raggiunge il terminale via CAN.
- ▪
- “Frontale tramite il CAN“
- È presente un sensore posizione di lavoro per determinare la posizione di lavoro della macchina sulla parte anteriore del veicolo. Esso è collegato a un computer di bordo ISOBUS o a un diverso terminale. Il segnale raggiunge il terminale via CAN.
- ▪
- “Posteriore tramite il CAN“
- È presente un sensore posizione di lavoro per determinare la posizione di lavoro della macchina sulla parte posteriore del veicolo. Esso è collegato a un computer di bordo ISOBUS o a un diverso terminale. Il segnale raggiunge il terminale via CAN.
Direzione di marcia
Con questo parametro è possibile configurare se il terminale deve ricevere il segnale della direzione di marcia, nonché definire la sua fonte. Se è disponibile il segnale della direzione di marcia, l'applicazione TRACK-Leader potrà tracciare correttamente il percorso durante la retromarcia.
Valori possibili:
- ▪
- “disattivata“
- Al terminale non è stato collegato nessun sensore della direzione di marcia. Qualora comunque un altro apparecchio ISOBUS invii un segnale della direzione di marcia, esso non verrà bloccato.
- ▪
- “Sens.non ricon.tram.il CAN“
- Il terminale riceve mediante il CAN un segnale della direzione di marcia, la cui provenienza è sconosciuta.
- ▪
- “Sensore radar tramite il CAN“
- Un sensore radar con il riconoscimento della direzione di marcia è collegato al terminale mediante il CAN.
- ▪
- “Sensore ruota tramite il CAN“
- Un sensore ruota con il riconoscimento della direzione di marcia è collegato al terminale mediante il CAN.
- ▪
- “Sensore direzione di marcia“
- Alla porta seriale del terminale è collegato un segnale della direzione di marcia. Non funziona, se al terminale è collegato il sensore di posizione di lavoro.
- ▪
- “Inversione“
- Con questo parametro viene invertito il senso del segnale. Valido solo se abbinato al parametro “Sensore direzione di marcia“.
Collegamento all'applicazione ISOBUS-TC?
Con questo parametro, è possibile impostare se l'applicazione Tractor-ECU deve comunicare con l'applicazione ISOBUS-TC. Facendo ciò, essa trasmette: contatori, posizione di lavoro, posizione del ricevitore GPS.
Disattivare questo parametro solo se il terminale è usato come terminale secondario e il ricevitore GPS è collegato a un terminale diverso.
Amp. di lavoro
Il valore verrà trasmesso all'applicazione ISOBUS-TC per il calcolo della superficie trattata.
Questo parametro consente di documentare nelle macchine non ISOBUS la superficie trattata, se si opera con TRACK-Leader senza un computer di bordo ISOBUS, nonché in caso di utilizzo simultaneo dell'applicazione ISOBUS-TC con i processi di lavorazione XML ISO.
In queste condizioni di norma i dati macchina non vengono trasmessi all'applicazione ISOBUS-TC. Per poter successivamente calcolare la superficie trattata nella cartella di conduzione della parcella agricola, potete inserire qui l'ampiezza di lavoro.
Questa funzione può essere utilizzata, solo se si dispone di un sensore posizione di lavoro.
Dopo l'utilizzo di una macchina non ISOBUS prestare attenzione di selezionare nel Tractor-ECU un profilo macchina diverso, in modo da non trasmettere sempre la stessa ampiezza di lavoro.
Informazioni aggiuntive